- Published on
深入理解Go调度器:如何初始化P(四)
- Authors

- Name
- Kevin
大家好, 我们继续 Go 调度器的旅程。
这篇文章,我们讲讲 GPM 模型中 P 组件内容,主要包含以下方面:
- 为什么需要 P
- P 的结构
- P 的数量
- P 的销毁
- 最重要的 procresize 函数
为什么需要 P
在初始GMP调度器中已经有所提及,我们在回顾一下。
在 Golang 1.1 版本之前调度器中还没有 P 组件,此时调度器的性能还比较差,社区的 Dmitry Vyukov 大佬针对当前调度器中存在的问题进行了总结并设计引入 P 组件来解决当前面临的问题(Scalable Go Scheduler Design Doc),并在 Go 1.1 版本中引入了 P 组件,引入 P 组件后不仅解决了文档中列的几个问题,也引入了一些很好的机制。
文档中列出了调度器主要的 4 个问题,分别有:
单一的全局互斥锁。
在以前没有 P 组件的时候,只有 G 和 M 两个组件,以及一个全局 G 队列。当工作线程 M 需要执行 G 的时候,需要频繁地加互斥锁从全局队列中获取 G 来执行,加锁处理对其他 G 的处理(比如创建,完成,调度等)存在很大的时延,性能很差。
G 的切换。
M 频繁地切换可运行的 G 会增加延迟和开销。比如新建的 G 会被放入全局队列,而不是在 M 的本地执行,这会导致不必要的开销和延迟,应该优先在创建 G 的 M 上执行。
引入 P 组件之后,新建的 G 会优先放在关联 P 的本地队列中。
M 的内存问题。
在以前的版本中,M 结构体中有一个
mcache字段,这是一个内存分配池。小对象会直接从mcache中进行分配,因为 G 在 M 上一个一个顺序执行的,G 申请小对象时会直接从mcache中进行分配,G 可以无锁地访问。但是,runtime 中每个时间都只会有一部分的 M 在运行 G,那些处于系统调用的 M 其实是不需要mcache的,这就造成了不必要的浪费。每个 M 的
mcache大概有 2M 大小的可用内存,当有上千个 G 处于阻塞状态时,就会有大量的内存浪费。其次,也存在较差的数据局部性问题。这是说 M 运行 G 时对 G 所使用的小对象进行了缓存,当 G 解除阻塞再次调度到同一个 M 时 可以加速访问这些数据,但实际场景中 G 被调度到同一个 M 的概率不高,所以数据局部性不好。
频繁的线程阻塞/唤醒问题。
在以前的调度器中,
runtime.GOMAXPROCS是限制系统线程的,只有这么多个 M。默认情况下下只有一个系统线程。因为 M 会执行系统调用等操作进入阻塞状态,当 M 阻塞以后不会新建 M 来执行其他任务,而是等待 M 的唤醒,M 在阻塞和唤醒之间频繁切换导致了额外的开销。引入 P 组件以后,当 M 处于系统调用状态以后,会解除与 P 的关联,调度器会唤醒已有的 M 或者 创建新的 M 来和 P 关联,继续运行 G。
P 的结构
P 对象的数据结构如下:
// src/runtime/runtime2.go#L609
type p struct {
id int32
status uint32 // P 的状态
link puintptr
schedtick uint32 // 被调度的次数,每调度一次递增
syscalltick uint32 // 执行系统调用的次数,每执行一次递增
sysmontick sysmontick // sysmon 最近一次运行的时间
m muintptr // P 所关联的 M,如果 P 为空闲状态,则为 nil
mcache *mcache // 小对象缓存,可以无锁访问
pcache pageCache // 页缓存,也可以无锁访问
raceprocctx uintptr
deferpool []*_defer // pool of available defer structs (see panic.go)
deferpoolbuf [32]*_defer
// Cache of goroutine ids, amortizes accesses to runtime·sched.goidgen.
// goroutine ids 缓存
goidcache uint64
goidcacheend uint64
// Queue of runnable goroutines. Accessed without lock.
// P 的本地可运行队列,LRQ,可无锁方位
// 由 runqhead, runqtail, runq 三者组成的无锁循环队列
// 最多存放 256 个可运行的g
runqhead uint32
runqtail uint32
runq [256]guintptr
// runnext, if non-nil, is a runnable G that was ready'd by
// the current G and should be run next instead of what's in
// runq if there's time remaining in the running G's time
// slice. It will inherit the time left in the current time
// slice. If a set of goroutines is locked in a
// communicate-and-wait pattern, this schedules that set as a
// unit and eliminates the (potentially large) scheduling
// latency that otherwise arises from adding the ready'd
// goroutines to the end of the run queue.
//
// Note that while other P's may atomically CAS this to zero,
// only the owner P can CAS it to a valid G.
// 待运行的 g
// 如果不为空,且当前时间片还有时间的话,优先运行runnext
// 其他 P 可以将其设置为 0,但只有自身的P 可以将其设置为非零
runnext guintptr
// Available G's (status == Gdead)
// 已结束运行的 G
gFree struct {
gList
n int32
}
sudogcache []*sudog
sudogbuf [128]*sudog
// Cache of mspan objects from the heap.
// 来自堆上的 mspan 缓存
mspancache struct {
// We need an explicit length here because this field is used
// in allocation codepaths where write barriers are not allowed,
// and eliminating the write barrier/keeping it eliminated from
// slice updates is tricky, moreso than just managing the length
// ourselves.
len int
buf [128]*mspan
}
// gc 相关字段
gcMarkWorkerMode gcMarkWorkerMode
gcMarkWorkerStartTime int64
gcw gcWork
......
// preempt is set to indicate that this P should be enter the
// scheduler ASAP (regardless of what G is running on it).
// 抢占标记
preempt bool
}
有了基本的认识,我们对 P 结构体中的几个关键字段,详细说明下:
runnext指向的是 g 指针,表示当前 P (进入_Prunning)立即要运行的 g,可能为nil。
如果此字段不为nil的话,将直接从runnext字段取,而不比从 runq 中取,所以其优先级高于runq。
这个字段是用来实现调度器的亲和性。我们知道一个 g 阻塞时,m 会从 p 的本地队列 或者 全局队列 再获取一个 g 来执行。如果原来的 g 执行阻塞结束,想再次被接着执行,就需要重新在 p 的 runq 进行排队,当runq 中有太多的 g 要执行时,导致这个刚刚被解除阻塞的 g 迟迟无法得到执行,同时还有可能被其他 m 窃取(因为窃取是从尾部开始偷)。从 Go 1.5 开始,得益于 P 的特殊属性,从阻塞 channel 返回的 g 会优先执行,此时只需要将这个 g 放在 runnext上即可。
本地可运行队列LRQ
runqhead,可运行队列的队头runqtail,可运行队列的队尾runq,可运行队列,最大256
这三个字段组成了一个无锁的循环队列,即 P 的本地可运行队列。
M 每次查找工作时,就是从这里找可运行的 g。
P 的数量
在【初始GPM模型】中已经提到过,P 的数量由用户决定,程序启动时环境变量$GOMAXPROCS或者 runtime 的GOMAXPROCS()方法决定。这意味着在程序的整个生命周期都最多只有$GOMAXPROCS个 G 在同时运行。
P 的销毁
如果在整个 Go 程序的运行时没有调整GOMAXPROCS,P 的数量就是不变的,所以不存在销毁。但是未使用的 P 会放到调度器的sched.pidle队列中,等有需要的时候,再从里面取出。
如果调小了GOMAXPROCS,那么会通过p.destroy()函数将多余的 P 关联的资源回收,并且将 P 设置为_Pdead状态,此时可能还有与 P 关联的 M,所以 P 对象不会回收。
扩展
有一篇博客提到了如何缩小它。
P 的状态
P 总共有五种状态,各自定义如下:
// src/runtime/runtime2.go#L106
const (
// P status
// _Pidle means a P is not being used to run user code or the
// scheduler. Typically, it's on the idle P list and available
// to the scheduler, but it may just be transitioning between
// other states.
//
// The P is owned by the idle list or by whatever is
// transitioning its state. Its run queue is empty.
_Pidle = iota
// _Prunning means a P is owned by an M and is being used to
// run user code or the scheduler. Only the M that owns this P
// is allowed to change the P's status from _Prunning. The M
// may transition the P to _Pidle (if it has no more work to
// do), _Psyscall (when entering a syscall), or _Pgcstop (to
// halt for the GC). The M may also hand ownership of the P
// off directly to another M (e.g., to schedule a locked G).
_Prunning
// _Psyscall means a P is not running user code. It has
// affinity to an M in a syscall but is not owned by it and
// may be stolen by another M. This is similar to _Pidle but
// uses lightweight transitions and maintains M affinity.
//
// Leaving _Psyscall must be done with a CAS, either to steal
// or retake the P. Note that there's an ABA hazard: even if
// an M successfully CASes its original P back to _Prunning
// after a syscall, it must understand the P may have been
// used by another M in the interim.
_Psyscall
// _Pgcstop means a P is halted for STW and owned by the M
// that stopped the world. The M that stopped the world
// continues to use its P, even in _Pgcstop. Transitioning
// from _Prunning to _Pgcstop causes an M to release its P and
// park.
//
// The P retains its run queue and startTheWorld will restart
// the scheduler on Ps with non-empty run queues.
_Pgcstop
// _Pdead means a P is no longer used (GOMAXPROCS shrank). We
// reuse Ps if GOMAXPROCS increases. A dead P is mostly
// stripped of its resources, though a few things remain
// (e.g., trace buffers).
_Pdead
)
翻译一下:
| 状态 | 描述 |
|---|---|
_Pidel | 没有运行任何代码,或者被调度器调度到,此时 P 的 LRQ 为空 |
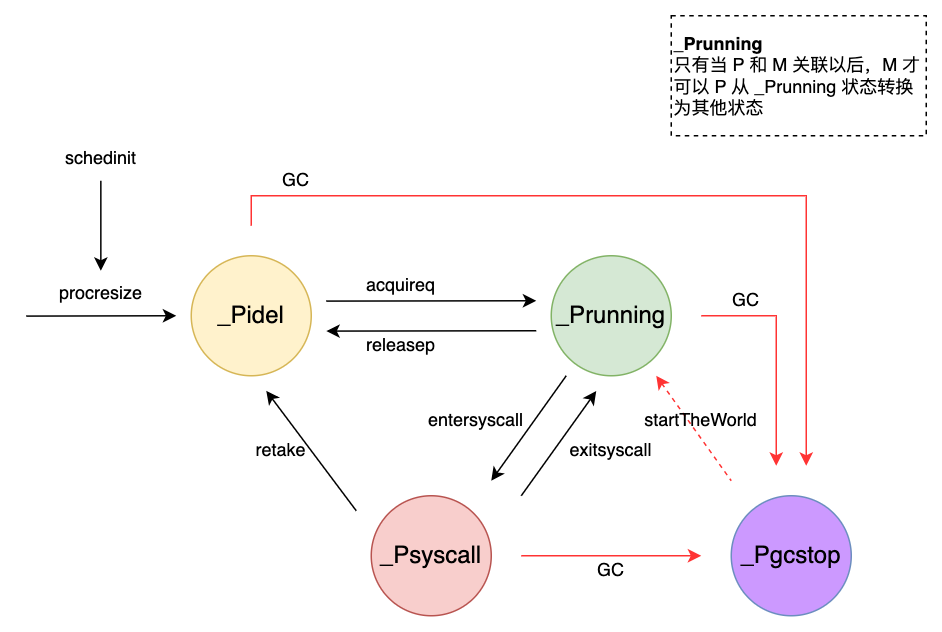
_Prunning | P 被 M 绑定,且运行用户代码或者调度器代码。只有绑定的 M 才可以改变_Prunning状态。M 可以修改 P 的状态为 _Pidle(无工作可做)、_Psyscall(系统调用)、_Pgcstop(GC);另外 M 也可以将 P 的使用权交给另一个 M (调度一个锁定状态的 G) |
_Psyscall | 当 G 被执行进入系统调用,P 会被关联的 M 设置为该状态 |
_Pgcstop | 当程序运行过程中发生 GC 时,P 会被关联的 M 设为该状态 |
_Pdead | 运行时如果将GOMAXPROCS调小,会将多余的 P 设置为该状态 |
【状态转移图】
在M如何找工作中,我们已经详细分析了acquireq函数和releasep函数,今天我们看下最主要的procresize函数,即 P 是如何被创建的。其他函数我们会在后续的篇章中逐一讲到。
P 的初始化
P 是在程序最开始的时候由调度器进行初始化,通过函数procresize实现,该函数在schedinit中被调用。
其源码如下:
// src/runtime/proc.go#L740 这段代码在 schedinit() 函数内部
lock(&sched.lock)
sched.lastpoll.Store(nanotime())
procs := ncpu
if n, ok := atoi32(gogetenv("GOMAXPROCS")); ok && n > 0 {
procs = n
}
if procresize(procs) != nil {
throw("unknown runnable goroutine during bootstrap")
}
unlock(&sched.lock)
这里先设置 procs,它决定了 P 的数量。ncpu 已经在前面被赋上了系统的核心数,所以代码里不设置环境变量 GOMAXPROCS 也没问题,如果设置了,则取环境变量值。
我们继续往下看:
// src/runtime/proc.go#L4937
// 入参:需要创建的 P 的个数
// 出参:P 的列表
func procresize(nprocs int32) *p {
// 环境检查,确保已经上锁,确保worldstop
assertLockHeld(&sched.lock)
assertWorldStopped()
// 参数检查,程序启动时 gomaxprocs为0
old := gomaxprocs
if old < 0 || nprocs <= 0 {
throw("procresize: invalid arg")
}
if trace.enabled {
traceGomaxprocs(nprocs)
}
// update statistics
now := nanotime()
if sched.procresizetime != 0 {
sched.totaltime += int64(old) * (now - sched.procresizetime)
}
sched.procresizetime = now
maskWords := (nprocs + 31) / 32
// Grow allp if necessary.
if nprocs > int32(len(allp)) {
// Synchronize with retake, which could be running
// concurrently since it doesn't run on a P.
lock(&allpLock)
if nprocs <= int32(cap(allp)) {
// 如果需要的 P 个数小于 allp 的容量,缩小 allp 容量
allp = allp[:nprocs]
} else {
// 否则,创建临时 nallp 数组,并 allp 全部拷贝至 nallp
nallp := make([]*p, nprocs)
// Copy everything up to allp's cap so we
// never lose old allocated Ps.
copy(nallp, allp[:cap(allp)])
// 更新 allp
allp = nallp
}
// 以上将 allp 调整到需要的大小,即 nproc
// .....
}
// initialize new P's
// 初始化 P, 初次启动时,old为0
for i := old; i < nprocs; i++ {
pp := allp[i]
// 申请新 P 对象
if pp == nil {
pp = new(p)
}
// 初始化 P,每个 P 都有一个ID,该ID就是 P 在 allp 的索引
pp.init(i)
// 将 P 放入 allp 中
atomicstorep(unsafe.Pointer(&allp[i]), unsafe.Pointer(pp))
}
// 以上,初始化了所有 p 对象,存放在 allp 数组中
// 获取当前正在运行的 g,初始化时后,这里就是g0
// 初始化时,g0所在的 p 还是0,所以会进入 else 逻辑
gp := getg()
if gp.m.p != 0 && gp.m.p.ptr().id < nprocs {
// continue to use the current P
// 继续使用当前的 P
gp.m.p.ptr().status = _Prunning
gp.m.p.ptr().mcache.prepareForSweep()
} else {
// 初始化会进到这个分支,
// ......
// 将 g0 所在 p 清空
gp.m.p = 0
// 取第 0 号 p,清空m, 并设置p状态为 _Pidle
pp := allp[0]
pp.m = 0
pp.status = _Pidle
// acquirep() 函数将 m0/p0 关联起来
acquirep(pp)
}
// g.m.p is now set, so we no longer need mcache0 for bootstrapping.
// 此时 m0,g0 已经设置,不在需要mcache0
mcache0 = nil
// release resources from unused P's
// 释放不在使用的 P 的资源,但不会收回 P,因为有可能处于系统调用的M还会关联 P
for i := nprocs; i < old; i++ {
pp := allp[i]
pp.destroy()
// can't free P itself because it can be referenced by an M in syscall
}
// Trim allp.
// 如果 allp 超过了 nprocs 进行缩容,一般运行时不调整 nprocs 所以不进入这个逻辑
if int32(len(allp)) != nprocs {
lock(&allpLock)
allp = allp[:nprocs]
idlepMask = idlepMask[:maskWords]
timerpMask = timerpMask[:maskWords]
unlock(&allpLock)
}
// 下面这个 for 循环检查 allp,将 空闲的P 放入全局空闲P列表;
// 如果 P 的 LRQ 不为空,即有工作可做,将这些可运行的 P 链起来
var runnablePs *p
for i := nprocs - 1; i >= 0; i-- {
pp := allp[i]
// allp[0] 已经跟 m0 关联了,所以要跳过
if gp.m.p.ptr() == pp {
continue
}
// 将状态转为 _Pidle
pp.status = _Pidle
// 如果 P 的 LRQ 为空,将其加入 全局空闲P列表
if runqempty(pp) {
pidleput(pp, now)
} else {
pp.m.set(mget())
pp.link.set(runnablePs)
runnablePs = pp
}
}
stealOrder.reset(uint32(nprocs))
var int32p *int32 = &gomaxprocs // make compiler check that gomaxprocs is an int32
atomic.Store((*uint32)(unsafe.Pointer(int32p)), uint32(nprocs))
if old != nprocs {
// Notify the limiter that the amount of procs has changed.
gcCPULimiter.resetCapacity(now, nprocs)
}
// 返回所有可运行的 P 列表
return runnablePs
}
总结一下,procresize函数主要做了以下工作:
- 根据传入的 nproc 参数,创建这么多 P,要么复用原来的P,要么新建
- 初次启动时,该函数完成了 M0 与 P0 的关联
- 检查 allp 列表,将所有空闲的 P 放入全局空闲 P 列表,返回所有可运行的 P 列表
这里面有一个关键函数acquirep,即关联 P 和 M,需要详细看一下:
// src/runtime/proc.go#L5088
// Associate p and the current m.
// 关联 P 到当前的 M
func acquirep(pp *p) {
// wirep 执行真正的关联
wirep(pp)
// 整理mcache
pp.mcache.prepareForSweep()
// ......
}
可以看到,执行关联的是wirep函数,继续往下看:
// src/runtime/proc.go
func wirep(pp *p) {
gp := getg()
if gp.m.p != 0 {
throw("wirep: already in go")
}
if pp.m != 0 || pp.status != _Pidle {
id := int64(0)
if pp.m != 0 {
id = pp.m.ptr().id
}
print("wirep: p->m=", pp.m, "(", id, ") p->status=", pp.status, "\n")
throw("wirep: invalid p state")
}
// 将 P / M 相互引用,并设置 P 为 _Prunning
gp.m.p.set(pp)
pp.m.set(gp.m)
pp.status = _Prunning
}
到此,procresize函数就分析结束了。从调度器的初始化来说,工作已经完成了。
这里引用下阿波张公众号的文章对该函数的总结,很简洁清楚。
- 使用 make([]*p, nprocs) 初始化全局变量 allp,即 allp = make([]*p, nprocs)
- 循环创建并初始化 nprocs 个 p 结构体对象并依次保存在 allp 切片之中
- 把 m0 和 allp[0] 绑定在一起,即 m0.p = allp[0],allp[0].m = m0
- 把除了 allp[0] 之外的所有 p 放入到全局变量 sched 的 pidle 空闲队列之中
关于第四点特别说明下,从代码看,对于非空闲的 P,该函数将其生成一个链表,并返回给调用者。
但实际上,schedinit函数对procresize的调用并没有关心其结果,如下:
// src/runtime/proc.go
if procresize(procs) != nil {
throw("unknown runnable goroutine during bootstrap")
}
所以,初始化的时候,procresize 就是将除 allp[0] 之外的所有 P 都放入了全局空闲 P 列表。
其他说明
通过上面对 go 1.20.3 版本源码的分析,做进一步的说明。
- 参考资料 2 中,作者所使用的源码是
go 1.9.2,新建的 P 的初始状态为_Pgcstop状态,但是在go 1.20.3版本中,新建的 P 初始状态为_Pidle。